Rozwiązanie robota spawalniczego dla stalowego panelu ściennego
spawanie Rozwiązanie robota dla stalowego panelu ściennego Zgrzewarka Zastosowanie 1. typ spawania plazmowego 2. 2 zestawy robotów, umieść robota z boku przedmiotu obrabianego 3. 2 zestawy źródło spawania plazmowego wyprodukowane w Chinach 4. 2szt podnośnik hydrauliczny 5. Serwo AC silniki i reduktory zostaną zainstalowane na linii produkcyjnej ....
Opis
spawanie Rozwiązanie robota do stalowego panelu ściennego 
Zastosowanie spawarki
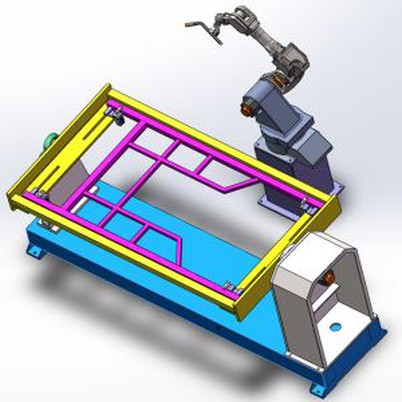
1. rodzaj spawania plazmowego
2. 2 zestawy robotów, umieść robota z boku przedmiotu obrabianego
3. 2 zestawy chińskiego źródła do spawania plazmowego
4. 2szt hydrauliczny podnośnik
5. Serwosilniki i reduktory prądu przemiennego zostaną zainstalowane na linii produkcyjnej. Silniki te będą napędzały wózek do przemieszczania się ze stacji na stację. Koszyk przejdzie z gotowym rozwiązaniem. Będziesz pracował z wieloma zmianami (non-stop).
6. 1 szt. Elektryczny (bez akumulatora) wózek napędzany serwosilnikiem (napraw panel 2440 × 1220 mm, silnik serwo AC, wyposażony w reduktor silnika serwo)
7. Używany do połączeń spoin pachwinowych. Stal musi być przyspawana punktowo.
Parametry robota spawalniczego
| Stopnie swobody | 6 osi | |
Ładowność | 6 kg | |
Dosięgnąć | 1445 mm | |
Prędkość liniowa spawania | 3-10 mm / s | |
Powtarzalność | ± 0,05 mm | |
Średnica drutu litego | φ1,2 mm | |
Prąd spawania | 350A | |
Czujnik | OMRON | |
Zakres ruchu | Obrót ramienia (JT1) | ± 165 ° |
Wyjście na ramię (JT2) | ± 150 ° ~ -90 ° | |
Uzbrojenie góra-dół (JT3) | ﹢ 45 ° ~ ﹣175 ° | |
Obrotowe nadgarstek (JT4) | ± 180 ° | |
Kolano nadgarstka (JT5) | ± 135 ° | |
Skręt nadgarstka (JT6) | ± 360 ° | |
maksymalna prędkość | Obrót ramienia (JT1) | 240 ° / s |
Wyjście na ramię (JT2) | 240 ° / s | |
Uzbrojenie góra-dół (JT3) | 220 ° / s | |
Obrotowe nadgarstek (JT4) | 430 ° / s | |
Kolano nadgarstka (JT5) | 430 ° / s | |
Skręt nadgarstka (JT6) | 650 ° / s | |
Moment (N * m) | Obrotowe nadgarstek (JT4) | 12 |
Kolano nadgarstka (JT5) | 12 | |
Skręt nadgarstka (JT6) | 3,75 | |
Moment bezwładności (kg * m2) | Obrotowe nadgarstek (JT4) | 0,4 |
Kolano nadgarstka (JT5) | 0,4 | |
Skręt nadgarstka (JT6) | 0,07 | |
Popularne Tagi: rozwiązanie robota spawalniczego do stalowego panelu ściennego, Chiny, producenci, dostawcy, fabryka
Wyślij zapytanie
Może ci się spodobać również